
Trasmissjoni manwali - gerboks robotiku
Kontenut
Kwalunkwe karozza moderna ma tkunx tista 'tibda u timxi bla xkiel jekk ma jkunx hemm trasmissjoni fl-apparat tagħha. Illum hemm varjetà wiesgħa ta ’kull tip ta’ gearboxes, li mhux biss jippermettu lis-sewwieq jagħżel l-għażla li tkun adattata għall-kapaċitajiet materjali tiegħu, iżda wkoll tagħmilha possibbli li tikseb kumdità massima mis-sewqan ta ’vettura.
Fil-qosor dwar it-tipi ewlenin ta 'trasmissjoni huwa deskritt f' reviżjoni separata... Issa ejja nitkellmu f'aktar dettall dwar x'inhi gearbox robotika, id-differenzi ewlenin tagħha minn gearbox manwali, u nikkunsidraw ukoll il-prinċipju ta 'tħaddim ta' din l-unità.
X'inhu gearbox robotika
It-tħaddim tal-gearbox huwa kważi identiku għall-analogu mekkaniku, bl-eċċezzjoni ta 'xi karatteristiċi. L-apparat tar-robot jinkludi bosta partijiet li jiffurmaw il-verżjoni mekkanika tal-kaxxa, li diġà hija familjari għal kulħadd. Id-differenza ewlenija bejn robotika hija li l-kontroll tagħha huwa ta 'tip ta' mikroproċessur. F'tali kaxxi tal-gerijiet, iċ-ċaqliq tal-gerijiet isir permezz ta 'elettronika bbażata fuq dejta minn sensuri tal-magna, tal-pedala tal-gass u tar-roti.

Kaxxa robotika tista 'tissejjaħ ukoll magna awtomatika, iżda dan huwa isem ħażin. Il-fatt hu li t-trasmissjoni awtomatika ħafna drabi tintuża bħala kunċett ġeneralizzanti. Allura, l-istess varjatur għandu mod awtomatiku biex jaqleb il-proporzjonijiet tal-gerijiet, allura għal xi wħud huwa wkoll awtomatiku. Fil-fatt, f'termini ta 'struttura u prinċipju ta' tħaddim, ir-robot huwa eqreb ta 'kaxxa mekkanika.
Esternament, huwa impossibbli li ssir distinzjoni ta 'trasmissjoni manwali minn trasmissjoni awtomatika, minħabba li jista' jkollhom selettur u korp identiċi. Tista 'tiċċekkja t-trasmissjoni biss waqt li l-vettura tkun qed issuq. Kull tip ta 'unità għandu l-karatteristiċi tax-xogħol tiegħu stess.
L-iskop ewlieni ta 'trasmissjoni robotika huwa li s-sewqan ikun faċli kemm jista' jkun. Is-sewwieq m'għandux għalfejn jaqleb il-gerijiet waħdu - dan ix-xogħol isir mill-unità ta 'kontroll. Minbarra l-kumdità, il-manifatturi tat-trasmissjoni awtomatika qed jagħmlu ħilithom biex jagħmlu l-prodotti tagħhom orħos. Illum, ir-robot huwa l-iktar tip ta 'gearbox baġitarju wara l-mekkaniżmi, iżda ma jipprovdix kumdità tas-sewqan bħal varjatur jew awtomatiku.
Il-prinċipju ta 'gerboks robotiku
It-trasmissjoni robotika tista 'taqleb għall-veloċità li jmiss jew awtomatikament jew semi-awtomatikament. Fl-ewwel każ, l-unità tal-mikroproċessur tirċievi sinjali mis-sensuri, li fuq il-bażi tagħhom jiġi attivat l-algoritmu programmat mill-manifattur.
Il-biċċa l-kbira tal-gerboks huma mgħammra b’selettur manwali. F'dan il-każ, il-veloċitajiet xorta jinxtegħlu awtomatikament. L-unika ħaġa hi li s-sewwieq jista 'jindika b'mod indipendenti l-mument li jinxtegħel tagħmir' il fuq jew 'l isfel. Xi trasmissjonijiet awtomatiċi tat-tip Tiptronic għandhom prinċipju simili.
Biex iżżid jew tnaqqas il-veloċità, is-sewwieq iċċaqlaq il-lever tas-selettur lejn + jew lejn -. Grazzi għal din l-għażla, xi nies isejħu din it-trasmissjoni sekwenzjali jew sekwenzjali.
Il-kaxxa robotika taħdem skont l-iskema li ġejja:
- Is-sewwieq japplika l-brejk, jistartja l-magna u jċaqlaq il-lever tas-selettur tal-mod tas-sewqan għall-pożizzjoni D;
- Is-sinjal mill-unità jmur għall-unità tal-kontroll tal-kaxxa;
- Jiddependi fuq il-mod magħżul, l-unità tal-kontroll tattiva l-algoritmu xieraq skond liema l-unità se topera;
- Fil-proċess tal-moviment, is-sensuri jibagħtu sinjali lill- "moħħ tar-robot" dwar il-veloċità tal-vettura, dwar it-tagħbija tal-power unit, kif ukoll dwar il-modalità tal-gearbox kurrenti;
- Hekk kif l-indikaturi ma jibqgħux jikkorrispondu mal-programm installat mill-fabbrika, l-unità tal-kontroll tagħti l-kmand li tinbidel għal ger ieħor. Dan jista 'jkun jew żieda jew tnaqqis fil-veloċità.
Meta sewwieq ikun qed isuq karozza bil-mekkaniżmi, huwa għandu jħoss il-vettura tiegħu sabiex jiddetermina l-mument meta jaqleb għal veloċità differenti. F'analogu robotiku, isir proċess simili, is-sewwieq biss m'għandux għalfejn jaħseb dwar meta għandu jċaqlaq il-lever tal-bidla għall-pożizzjoni mixtieqa. Il-mikroproċessur jagħmel dan minflok.
Is-sistema tissorvelja l-informazzjoni kollha mis-sensuri kollha u tagħżel l-aħjar ger għal tagħbija speċifika. Sabiex l-elettronika tkun tista 'tbiddel l-irkaptu, it-trasmissjoni għandha attwatur idromekkaniku. F'verżjoni aktar komuni, minflok idromekkanika, hija installata drive elettriku jew servo drive, li jgħaqqad / jiskonnettja l-clutch fil-kaxxa (bil-mod, dan għandu xi xebh ma 'magna awtomatika - il-clutch jinsab mhux fejn huwa fit-trasmissjoni manwali, jiġifieri ħdejn il-flywheel, iżda fit-trasmissjoni tad-djar innifsu).
Meta l-unità tal-kontroll tagħti sinjal li wasal iż-żmien li taqleb għal veloċità oħra, l-ewwel servo drive elettriku (jew idromekkaniku) jiġi attivat l-ewwel. Tneħħi l-uċuħ tal-frizzjoni tal-klaċċ. It-tieni servo mbagħad iċċaqlaq l-irkaptu fil-mekkaniżmu għall-pożizzjoni mixtieqa. Imbagħad l-ewwel wieħed joħroġ bil-mod il-klaċċ. Dan id-disinn jippermetti li l-mekkaniżmu jaħdem mingħajr il-parteċipazzjoni tas-sewwieq, allura magna bi trażmissjoni robotika m'għandhiex pedala tal-klaċċ.

Ħafna kaxex tas-seletturi sfurzaw il-pożizzjonijiet tal-irkaptu. Dan l-hekk imsejjaħ tiptronic jippermetti lis-sewwieq jikkontrolla b'mod indipendenti l-mument li jaqleb għal veloċità ogħla jew aktar baxxa.
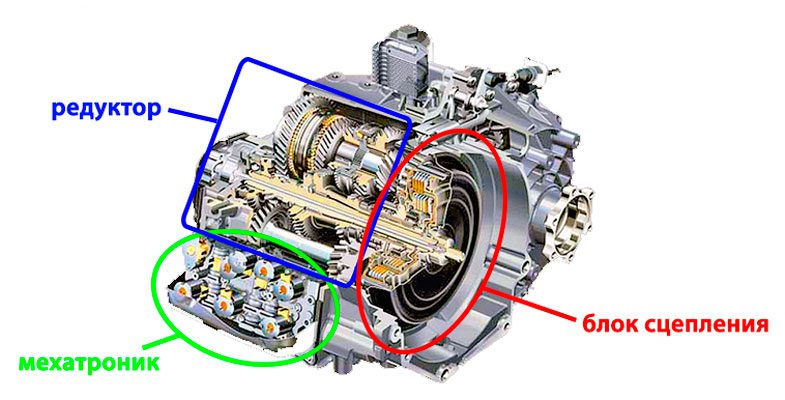
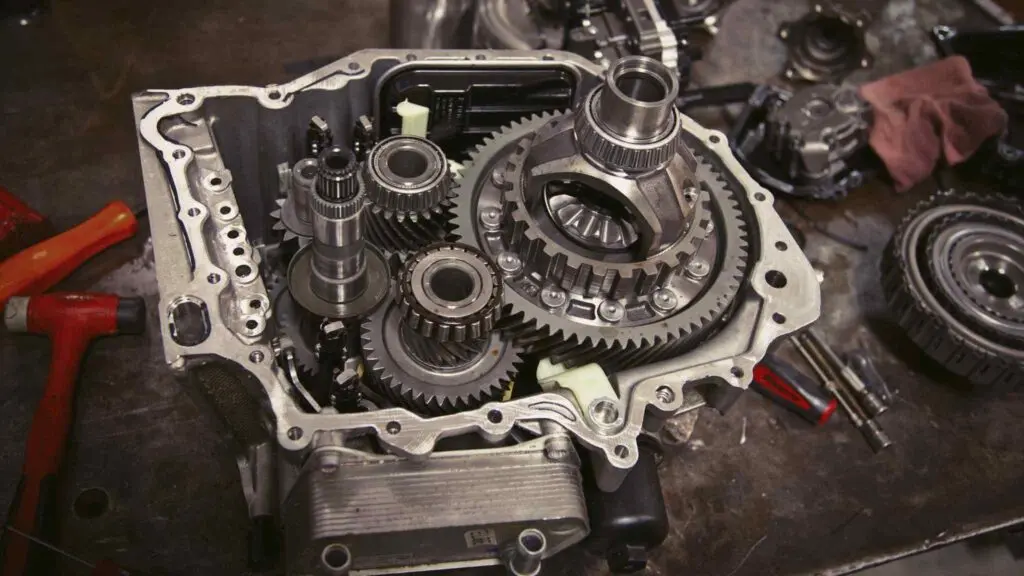
Apparat tal-gerboks robotiku
Illum hemm diversi tipi ta 'trasmissjonijiet robotiċi għall-karozzi tal-passiġġieri. Jistgħu jkunu differenti minn xulxin f'xi elementi ta 'attwazzjoni, iżda l-partijiet ewlenin jibqgħu identiċi.
Hawn huma n-nodi inklużi fil-gearbox:
- Klaċċ. Skond il-manifattur u l-modifika ta 'l-unità, din tista' tkun parti waħda b'wiċċ tal-frizzjoni jew bosta diski simili. Ħafna drabi, dawn l-elementi jinsabu fil-likwidu li jkessaħ, li jistabbilizza t-tħaddim tal-unità, u ma jħallihx jisħon iżżejjed. L-għażla preselettiva jew doppja hija kkunsidrata aktar effettiva. F'din il-modifika, waqt li ger wieħed huwa mqabbad, it-tieni sett qed jipprepara biex jixgħel il-veloċità li jmiss.
- Il-parti ewlenija hija kaxxa mekkanika konvenzjonali. Kull manifattur juża disinni proprjetarji differenti. Pereżempju, robot mill-marka Mercedes (Speedshift) huwa internament trasmissjoni awtomatika 7G-Tronic. L-unika differenza bejn l-unitajiet hija li minflok konvertitur tat-torque, jintuża klaċċ b'diversi diski tal-frizzjoni. Il-BMW għandha approċċ simili. Il-gearbox SMG tagħha hija bbażata fuq gearbox manwali ta ’sitt veloċitajiet.
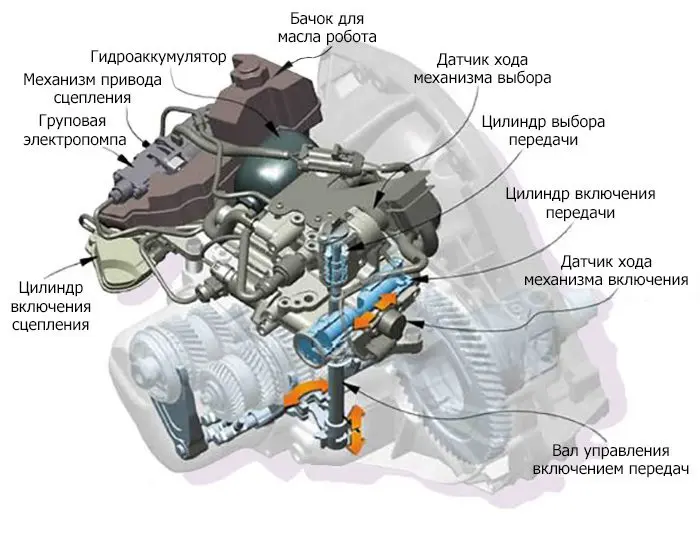
- Klaċċ u gear gear. Hemm żewġ għażliet - bi drive elettriku jew analogu idromekkaniku. Fl-ewwel każ, il-klaċċ huwa mbuttat minn mutur elettriku, u fit-tieni - b'ċilindri idrawliċi b'valvi EM. Is-sewqan elettriku jaħdem aktar bil-mod mill-idrawlika, iżda ma jeħtieġx li tinżamm pressjoni kostanti fil-linja, li minnha jopera t-tip elettro-idrawliku. Robot idrawliku, min-naħa l-oħra, jimxi għall-istadju li jmiss ħafna iktar malajr (0,05 sekondi kontra 0,5 sekondi għal analogu elettriku). Kaxxa tal-gerijiet elettrika hija prinċipalment installata fuq karozzi tal-baġit, u kaxxa tal-gerijiet idromekkaniċi hija installata fuq karozzi sportivi premium, peress li l-veloċità tal-bdil tal-gerijiet hija importanti ħafna fihom mingħajr ma tinterrompi l-provvista tal-enerġija għax-xaft tas-sewqan.

- Sensor. Hemm ħafna partijiet bħal dawn fir-robot. Huma jissorveljaw bosta parametri differenti tat-trasmissjoni, pereżempju, il-pożizzjoni tal-frieket, ir-rivoluzzjonijiet tax-xaftijiet tad-dħul u tal-ħruġ, f'liema pożizzjoni l-iswiċċ tas-selettur huwa msakkar, it-temperatura tal-likwidu li jkessaħ, eċċ. Din l-informazzjoni kollha tingħata lill-apparat ta 'kontroll tal-mekkaniżmu.
- L-ECU hija unità tal-mikroproċessur, li fiha algoritmi differenti huma programmati għal indikaturi differenti ġejjin minn sensuri. Din l-unità hija mqabbda mal-unità ta 'kontroll prinċipali (minn hemm tiġi d-dejta dwar l-operazzjoni tal-magna), kif ukoll ma' sistemi elettroniċi li jissakkru r-roti (ABS jew ESP).
- Attwaturi - ċilindri idrawliċi jew muturi elettriċi, skond il-modifika tal-kaxxa.
L-ispeċifiċitajiet tax-xogħol tal-RKPP
Sabiex il-vettura tibda bla xkiel, is-sewwieq għandu juża l-pedala tal-klaċċ b'mod korrett. Wara li jkun inkluda l-ewwel ger jew ir-rivers, jeħtieġ li jirrilaxxa l-pedala bla xkiel. Ladarba s-sewwieq ikollu sensazzjoni għall-ingaġġ tad-diski, hekk kif il-pedala tkun rilaxxata, huwa jista 'jżid revs mal-magna sabiex il-karozza ma tieqafx. Hekk taħdem il-mekkanika.
Proċess identiku jseħħ fil-kontroparti robotika. F'dan il-każ biss, ħila kbira mhix meħtieġa mis-sewwieq. Huwa biss jeħtieġ li jċaqlaq is-swiċċ tal-kaxxa għall-pożizzjoni xierqa. Il-karozza tibda tiċċaqlaq skont is-settings tal-unità tal-kontroll.

L-aktar modifika sempliċi ta 'klaċċ wieħed taħdem bl-istess mod bħall-mekkanika klassika. Madankollu, fl-istess ħin, hemm problema waħda - l-elettronika ma tirrekordjax il-feedback tal-klaċċ. Jekk persuna tkun kapaċi tiddetermina kemm bla xkiel huwa meħtieġ li tirrilaxxa l-pedala f'każ partikolari, allura l-awtomazzjoni taħdem b'mod aktar riġidu, allura l-moviment tal-karozza huwa akkumpanjat minn ċaqliq tanġibbli.
Dan jinħass b'mod speċjali fil-modifiki bi drive elettriku ta 'l-attwaturi - waqt li l-irkaptu jkun qiegħed jinbidel, il-klaċċ ikun fi stat miftuħ. Dan se jfisser waqfa fil-fluss tat-torque, li minħabba fiha l-karozza tibda tnaqqas il-veloċità. Peress li l-veloċità tar-rotazzjoni tar-roti hija diġà inqas konsistenti mat-tagħmir imqabbad, hemm skoss żgħir.
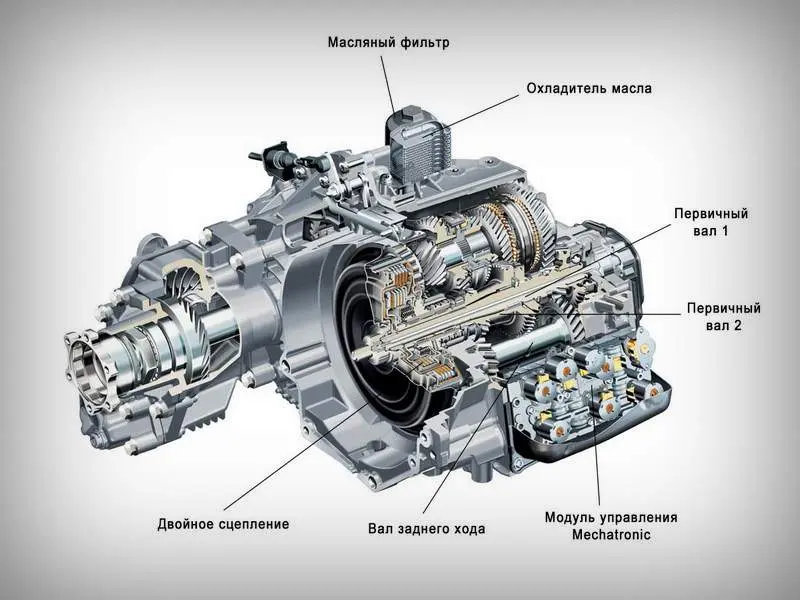
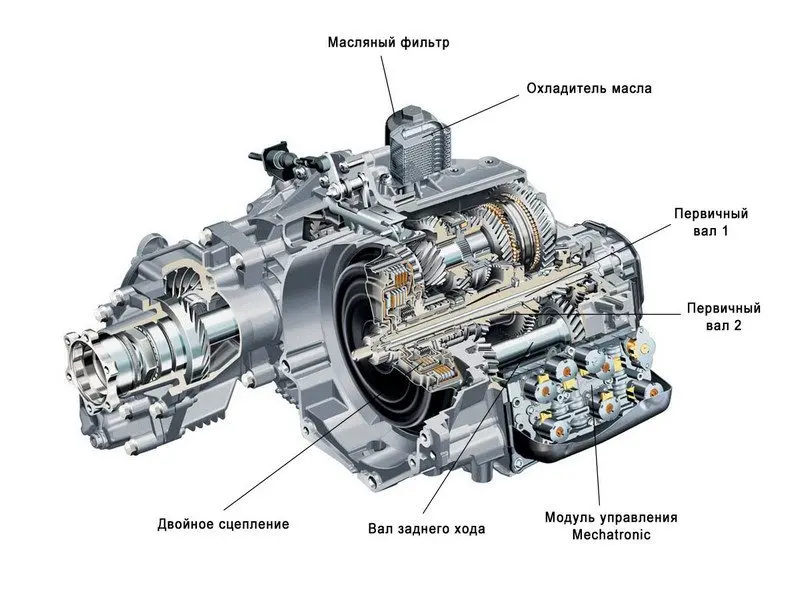
Soluzzjoni innovattiva għal din il-problema kienet l-iżvilupp ta 'modifika ta' klaċċ doppju. Rappreżentant impressjonanti ta 'trasmissjoni bħal din huwa l-Volkswagen DSG. Ejja nagħtu ħarsa aktar mill-qrib lejn il-karatteristiċi tiegħu.
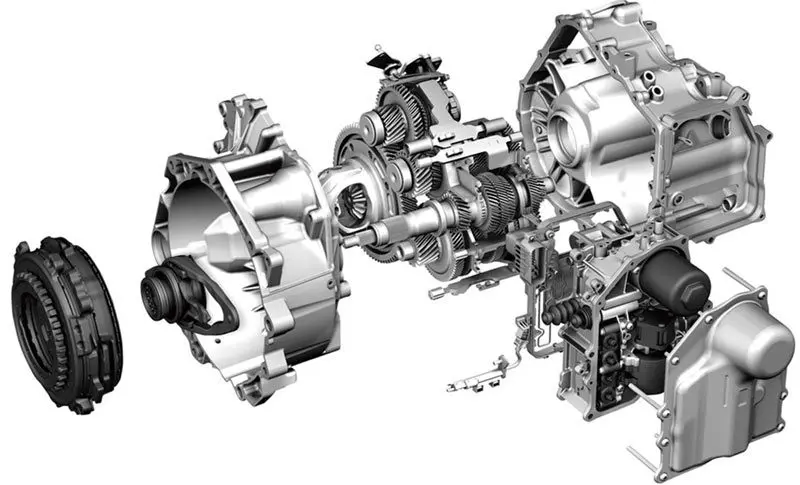
Karatteristiċi tal-gerboks robotiku DSG
Dan l-akronimu jirreferi għal gear shift dirett. Fil-fatt, dawn huma żewġ kaxxi mekkaniċi installati f'qafas wieħed, iżda b'punt ta 'konnessjoni wieħed max-xażi tal-magna. Kull mekkaniżmu għandu l-klaċċ tiegħu stess.
Il-karatteristika ewlenija ta 'din il-modifika hija l-mod preselettiv. Jiġifieri, waqt li l-ewwel xaft jaħdem bit-tagħmir imqabbad, l-elettronika diġà tgħaqqad l-irkaptu korrispondenti (meta taċċellera biex iżżid it-tagħmir, meta tiddeċelera - biex tbaxxi) tat-tieni xaft. L-attwatur ewlieni jeħtieġ biss jiskonnettja klaċċ wieħed u jgħaqqad l-ieħor. Hekk kif tasal sinjal mill-unità tal-kontroll biex taqleb għal stadju ieħor, il-klaċċ tax-xogħol jinfetaħ, u t-tieni wieħed bl-irkaptu diġà maljat huwa konness immedjatament.
Dan id-disinn jippermettilek tirkeb mingħajr ċaqliq qawwi meta taċċellera. L-ewwel żvilupp ta 'modifika preselettiva deher fis-snin 80 tas-seklu li għadda. Veru, allura robots bi klaċċ doppju ġew installati fuq karozzi tar-rally u tat-tlielaq li fihom il-veloċità u l-eżattezza tat-tibdil tal-gerijiet huma ta 'importanza kbira.
Jekk inqabblu l-kaxxa DSG ma 'awtomatika klassika, allura l-ewwel għażla għandha aktar vantaġġi. L-ewwelnett, minħabba l-istruttura aktar familjari tal-elementi ewlenin (il-manifattur jista 'jieħu kwalunkwe analogu mekkaniku lest bħala bażi), kaxxa bħal din tkun orħos għall-bejgħ. L-istess fattur jaffettwa l-manutenzjoni tal-unità - il-mekkaniżmi huma aktar affidabbli u aktar faċli biex jissewwew.
Dan ippermetta lill-manifattur jinstalla trasmissjoni innovattiva fuq il-mudelli tal-baġit tal-prodotti tagħhom. It-tieni, bosta sidien ta 'vetturi b'tali gearbox jinnutaw żieda fl-ekonomija tal-karozza meta mqabbla ma' mudell identiku, iżda b'gearbox differenti.
L-inġiniera tat-tħassib tal-VAG żviluppaw żewġ varjanti tat-trasmissjoni DSG. Waħda minnhom hija ttikkettata 6, u l-oħra hija 7, li tikkorrispondi għan-numru ta 'passi fil-kaxxa. Ukoll, awtomatiku ta ’sitt veloċitajiet juża klaċċ imxarrab, u analogu ta’ seba ’veloċitajiet juża klaċċ niexef. Aktar dettalji dwar il-vantaġġi u l-iżvantaġġi tal-kaxxa DSG, kif ukoll kif inkella l-mudell DSG 6 huwa differenti mis-seba 'modifika, huwa deskritt f' artikolu separat.
Vantaġġi u żvantaġġi
It-tip ikkunsidrat ta 'trasmissjoni għandu kemm naħat pożittivi kif ukoll negattivi. Il-vantaġġi tal-kaxxa jinkludu:
- Tali trasmissjoni tista 'tintuża flimkien ma' unità ta 'enerġija ta' kważi kull qawwa;
- Meta mqabbla ma 'varjatur u magna awtomatika, il-verżjoni robotika hija orħos, għalkemm dan huwa żvilupp pjuttost innovattiv;
- Robots huma aktar affidabbli minn trasmissjonijiet awtomatiċi oħra;
- Minħabba x-xebh intern mal-mekkaniżmi, huwa iktar faċli li ssib speċjalista li jieħu ħsieb it-tiswija tal-unità;
- Ċaqliq tal-ger aktar effiċjenti jippermetti l-użu tal-qawwa tal-magna mingħajr żieda kritika fil-konsum tal-fjuwil;
- Billi ttejjeb l-effiċjenza, il-magna toħroġ sustanzi inqas ta 'ħsara fl-ambjent.
Minkejja l-vantaġġi ċari fuq trasmissjonijiet awtomatiċi oħra, ir-robot għandu bosta żvantaġġi sinifikanti:
- Jekk karozza hija mgħammra b'robot b'diska waħda, allura vjaġġ fuq trasport bħal dan ma jistax jissejjaħ komdu. Meta tibdel il-gerijiet, ikun hemm jerks tanġibbli, bħallikieku s-sewwieq f'daqqa jitfa 'l-pedala tal-klaċċ fuq il-mekkaniżmi.
- Ħafna drabi, il-klaċċ (inqas ingaġġ bla xkiel) u l-attwaturi jonqsu fl-unità. Dan jikkumplika t-tiswija tat-trasmissjonijiet, peress li għandhom riżorsa żgħira tax-xogħol (madwar 100 elf kilometru). Huwa rari li s-servos jistgħu jissewwew u mekkaniżmu ġdid jiswa ħafna flus.
- Fir-rigward tal-klaċċ, ir-riżorsa tad-diska hija wkoll żgħira ħafna - madwar 60 elf. Barra minn hekk, bejn wieħed u ieħor f'nofs ir-riżorsa huwa meħtieġ li titwettaq il- "konnessjoni" tal-kaxxa taħt il-kondizzjoni tal-wiċċ tal-frizzjoni tal-partijiet.
- Jekk nitkellmu dwar il-modifika preselettiva tad-DSG, allura rriżulta li huwa iktar affidabbli minħabba inqas ħin għall-iswiċċjar tal-veloċitajiet (grazzi għal dan, il-karozza ma tnaqqasx ħafna r-ritmu tagħha). Minkejja dan, il-qabda għadha tbati fihom.
Meta nikkunsidraw il-fatturi elenkati, nistgħu nikkonkludu li safejn huma kkonċernati l-affidabbiltà u l-ħajja tax-xogħol, il-mekkaniżmi għad m'għandhomx ugwali. Jekk issir enfasi fuq il-kumdità massima, allura huwa aħjar li tagħżel varjatur (x'inhi l-karatteristika tiegħu, aqra hawn). Wieħed għandu jżomm f'moħħu li trasmissjoni bħal din mhux se tipprovdi opportunità biex jiġi ffrankat il-fjuwil.
Bħala konklużjoni, noffru paragun qasir tal-vidjow tat-tipi ewlenin ta 'trasmissjonijiet - il-vantaġġi u l-iżvantaġġi tagħhom:

Mistoqsijiet u Tweġibiet:
X'inhi d-differenza bejn awtomat u robot? It-trasmissjoni awtomatika taħdem għad-detriment ta 'konvertitur tat-torque (m'hemm l-ebda akkoppjar riġidu mal-flywheel permezz tal-klaċċ), u r-robot huwa analogu għall-mekkanika, il-veloċitajiet biss jinxtegħlu awtomatikament.
Kif tibdel il-gerijiet fuq kaxxa robot? Il-prinċipju tas-sewqan ta 'robot huwa identiku għas-sewqan ta' awtomatiku: il-mod mixtieq jintgħażel fuq is-selettur, u l-veloċità tal-magna hija regolata mill-pedala tal-gass. Il-veloċitajiet se jaqilbu waħedhom.
Kemm hemm pedali f'karozza b'robot? Għalkemm ir-robot huwa strutturalment simili għal mekkanik, il-klaċċ huwa awtomatikament disingaġġat mill-flywheel, għalhekk karozza bi trasmissjoni robotika għandha żewġ pedali (gass u brejk).
Kif tipparkja sew karozza b'kaxxa robot? Il-mudell Ewropew irid ikun ipparkjat fil-modalità A jew fir-reverse gear. Jekk il-karozza hija Amerikana, allura hemm mod P fuq is-selettur.
Kumment wieħed
David
Hello, għandi bżonn l-għajnuna, 203 coupes marru fil-mod ta 'emerġenza, x'nista' nagħmel?